This is an invention to improve the repeatability of component assembly of the MesoMill. 1 micron repeatability in assembly should be possible.
The Modular Kinematic Coupling (ModKinCoup) is designed so that when two parts are assembled using it the parts are first accurately located (with respect to each other) by the mating of exactly 6 points. Thereby extactly constraining all 6 degrees of freedom.
Once the two structures have been aligned, they can be clamped together to provide strength. This design de-couples the alignment and clamping functions to different sets of parts. So that each set of parts can performing their functions optimally.
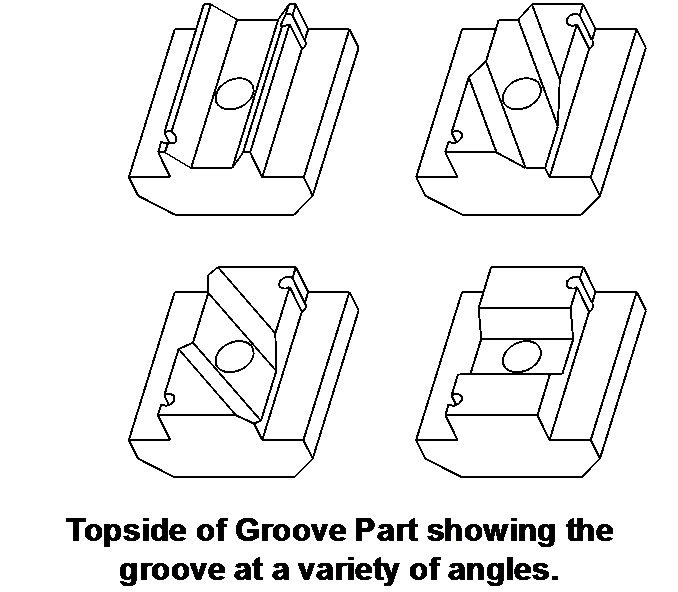
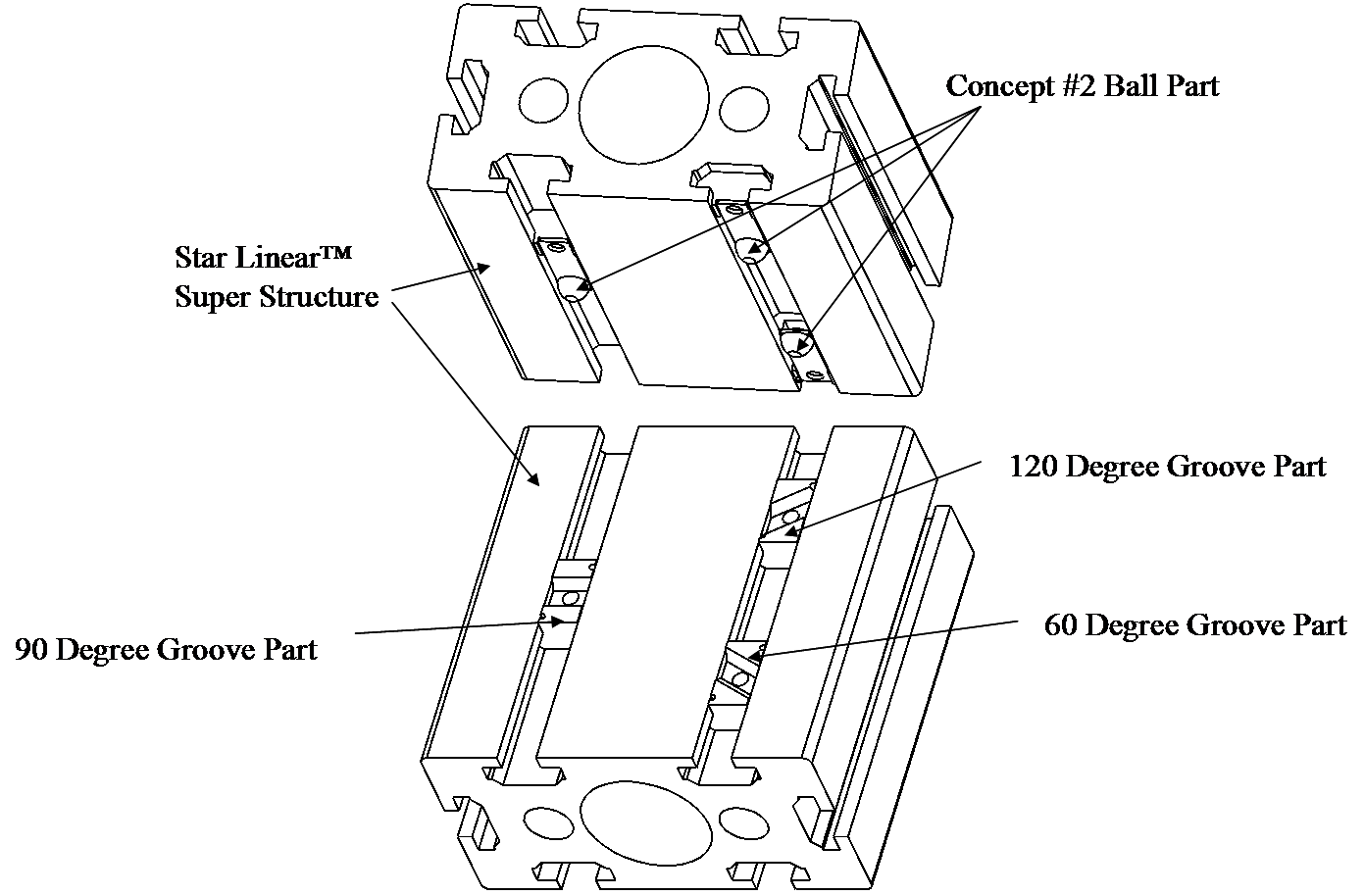
The Modular Kinematic Coupling consists of two types of parts, a grove part and a ball part. Joint is made up of three of each. Since each ball will contact each grove in exactly 2 places this provides the 6 contact points. Additionally the groves must be in different orientations, with respect to each other, so that each contact point constrains a degree of freedom.
|
|
|
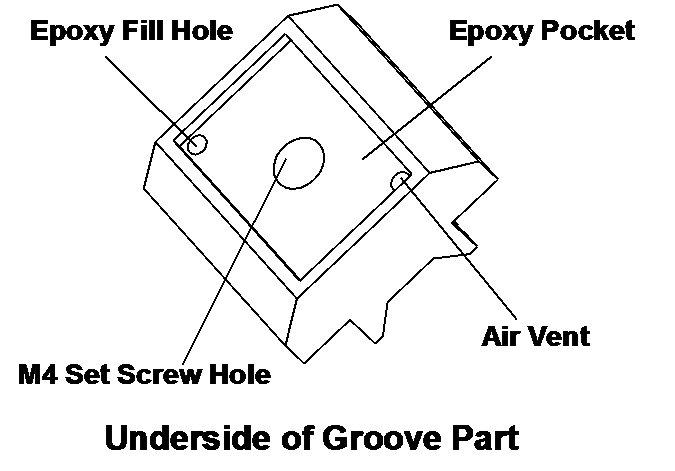
The grove part is temporairily held inplace with a set screw. Once the correct location has be determined and verfied it can be epoxied in place, using the epoxy pocket and fill/vent holes for maximum repeatability.
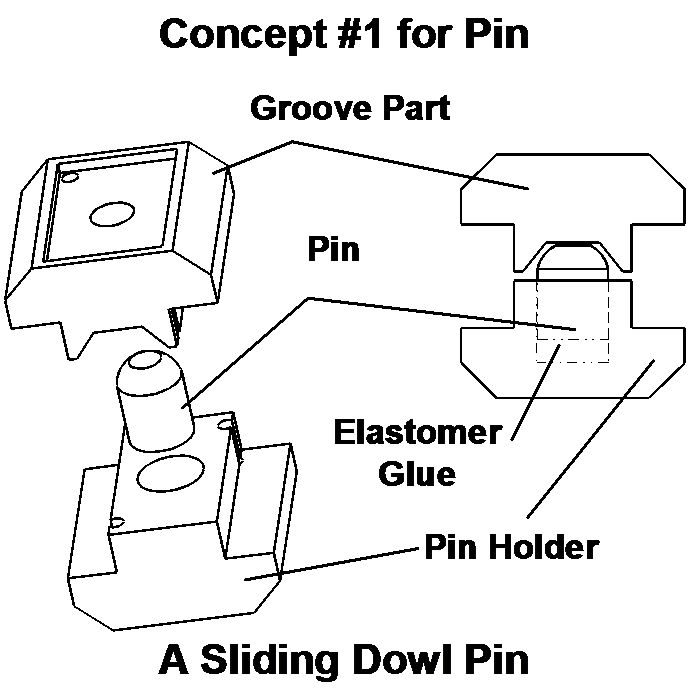
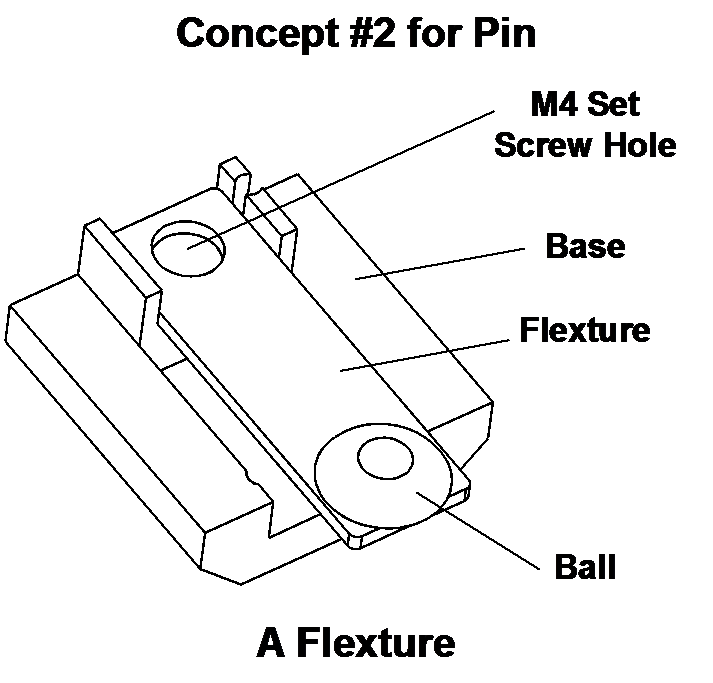
The ball part must provide a small amount of vertical compliance. The slight vertical compliance allows the two components to be aligned using the 6 contact points and then clamped together to bring both surfaces into contact.
I propose two methods of allowing a slight amount of vertical compliance.
|
|
|
Like the grove part, the ball part can be epoxied into place.
Copyright: Roger Cortesi 1999-2006